I am a senior lecturer at the Department of Electronic and Telecommunication Engineering at the University of Moratuwa, Sri Lanka. I work in the area of computer vision. Within this, surveillance, scene understanding, tracking, and activity recognition are of particular interest. We extensively use deep learning for our work. Our current work includes learning in robotics, making deep networks more effective by exploring new architectures, developing new routing algorithms, and improving convolution layers.
Digital Histopathology
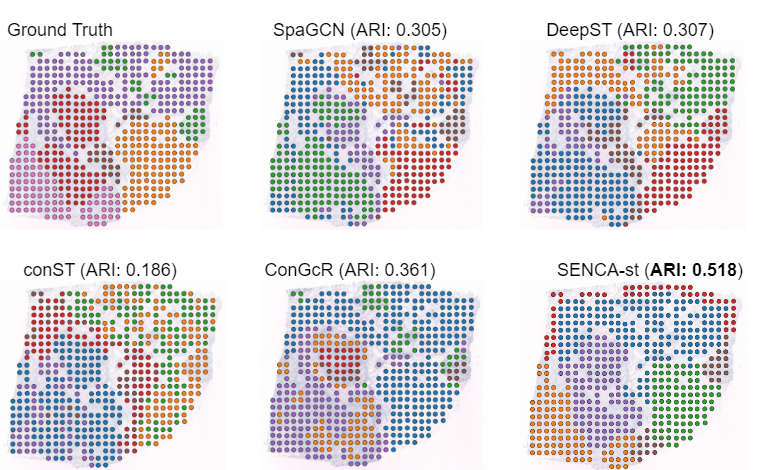
These works advance AI-driven cancer pathology by addressing two key challenges: multimodal data integration and limited annotations. The SENCA-st framework introduces a cross-attention-based shared encoder to effectively fuse histopathology images with spatial transcriptomics, enabling precise identification of tumor heterogeneity and microenvironmental regions by capturing both structural and functional differences. Complementing this, the uncertainty-aware learning approach improves cancer subtyping by estimating model confidence and strategically selecting only the most informative samples for expert annotation, achieving state-of-the-art performance with minimal labeled data. Together, these contributions provide a scalable and efficient pathway for more accurate and data-efficient computational pathology systems.
Shanaka Liyanaarachchi, Chathurya Wijethunga, Shihab Ahamed, Akthas Absar, and Ranga Rodrigo, "SENCA-st: Integrating Spatial Transcriptomics and Histopathology with Cross Attention Shared Encoder for Region Identification in Cancer Pathology," in Proceedings of Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, , March 2026, pp. 3578--3587.
URL: https://openaccess.thecvf.com/content/WACV2026/html/Liyanaarachchi_SENCA-st_Integrating_Spatial_Transcriptomics_and_Histopathology_with_Cross_Attention_Shared_WACV_2026_paper.html
URL: https://openaccess.thecvf.com/content/WACV2026/html/Liyanaarachchi_SENCA-st_Integrating_Spatial_Transcriptomics_and_Histopathology_with_Cross_Attention_Shared_WACV_2026_paper.html
Nirhoshan Sivaroopan, Chamuditha Galappaththige, Chalani Ekanayake, Hasindri Watawana, Ranga Rodrigo, and Chamira Edussooriya, "Uncertainty Awareness Enables Efficient Labeling for Cancer Subtyping in Digital Pathology," in Proceedings of Winter Conference on Applications of Computer Vision (WACV), , 2025, pp. 589--598.
URL: https://ieeexplore.ieee.org/abstract/document/10944092
URL: https://ieeexplore.ieee.org/abstract/document/10944092
Point Cloud Processing
Point clouds, usually obtained using LiDARs, is an important perception manner commonplace in vision based autonomous navigation. One challenge of large-scale outdoor LiDAR point clouds is the high volume of points; generally millions of points per frame of observation. Object detection, and semantic segmentation important problems in the point-cloud domain.
Mohamed Afham, Isuru Dissanayake, Dinithi Dissanayake, Amaya Dharmasiri, Kanchana Thilakarathna, and Ranga Rodrigo, "CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding
," in Proceedings of IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, June 2022, pp. 1-10.
URL: https://openaccess.thecvf.com/content/CVPR2022/html/Afham_CrossPoint_Self-Supervised_Cross-Modal_Contrastive_Learning_for_3D_Point_Cloud_Understanding_CVPR_2022_paper.html
URL: https://openaccess.thecvf.com/content/CVPR2022/html/Afham_CrossPoint_Self-Supervised_Cross-Modal_Contrastive_Learning_for_3D_Point_Cloud_Understanding_CVPR_2022_paper.html
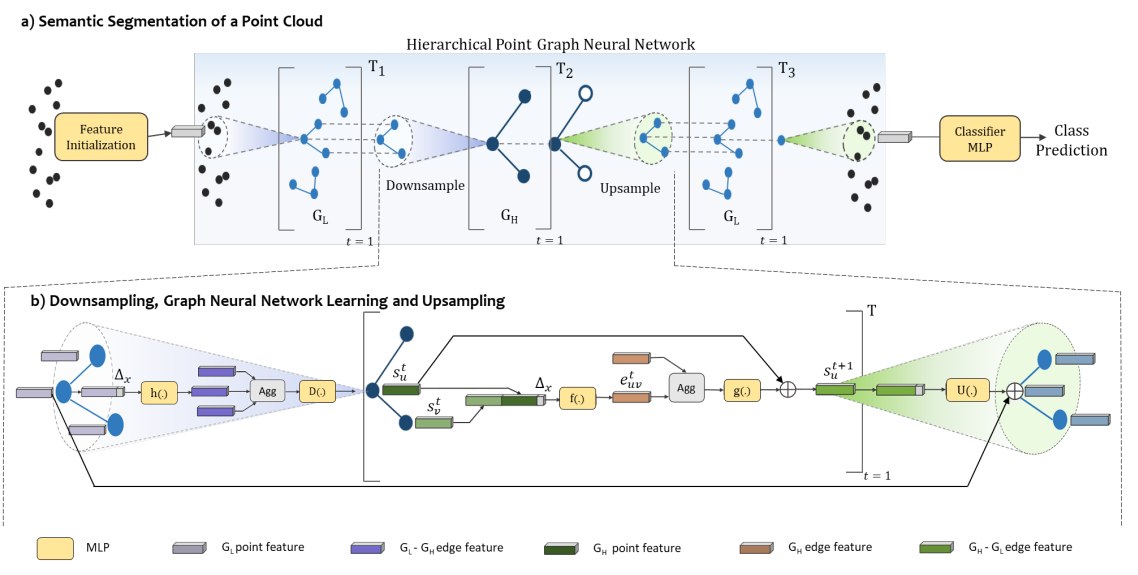
Arulmolivarman Thieshanthan, Amashi Niwarthana, Pamuditha Somarathne, Tharindu Wickremasinghe, and Ranga Rodrigo, "HPGNN: Using Hierarchical Graph Neural Networks for Outdoor Point Cloud Processing," in Proceedings of International Conference on Pattern Recognition, Montreal, QC, 2022, pp. 1--7.
URL: https://arxiv.org/abs/2206.02153
URL: https://arxiv.org/abs/2206.02153
Dishanika Denipitiyage, Vinoj Jayasundara, Chamira Edussooriya, and Ranga Rodrigo, "PointCaps: Raw point cloud processing using capsule networks with Euclidean distance routing," Journal of Visual Communication and Image Representation, vol. 88, no. , pp. 103612, 2022.
URL: https://www.sciencedirect.com/science/article/abs/pii/S1047320322001365
URL: https://www.sciencedirect.com/science/article/abs/pii/S1047320322001365
Vision for Self-Driving
Computer vision is an enabler for self-driving, whether the input is camera based-video or LIDAR-based point clouds. We are working along multiple avenues to contribute to this important area.
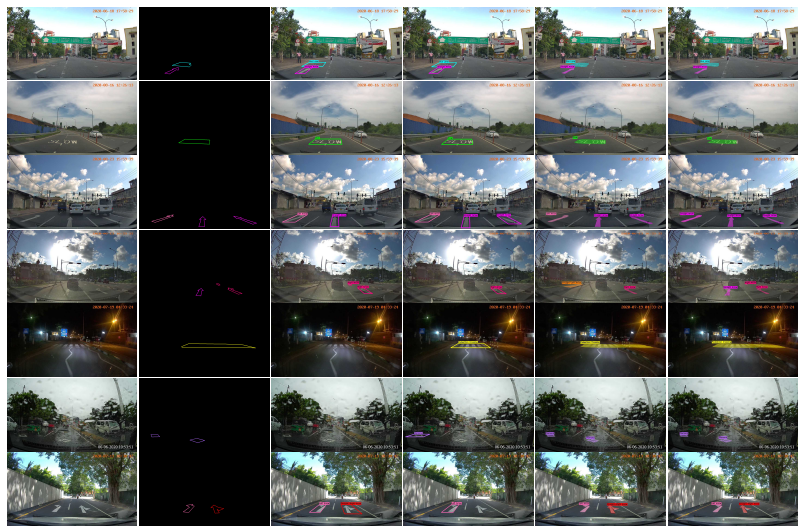
Road marking detection and lane detection directly assist self-driving. We have introduced a novel road marking benchmark dataset for road marking detection, addressing the limitations in the existing publicly available datasets such as lack of challenging scenarios, prominence given to lane markings, unavailability of an evaluation script, lack of annotation formats and lower resolutions. In SwiftLane, we presented a simple and light-weight, end-to-end deep learning based framework, coupled with the row-wise classification formulation for fast and efficient lane detection. Both these were with the support from Creative Software under the supervision of Dr. Peshala Jayasekara.
Inspired by recent improvements in point cloud processing for autonomous navigation, we focused on using hierarchical graph neural networks for processing and feature learning over large-scale outdoor LiDAR point clouds. In point based and GNN models for semantic segmentation with our work achieves a significant improvement for GNNs on the SemanticKITTI dataset. We have also made a more fundamental contribution in using cross-modal contrastive learning approach to learn transferable 3D point cloud representations.
Oshada Jayasinghe, Damith Anhettigama, Sahan Hemachandra , Shenali Kariyawasam , Ranga Rodrigo, and Peshala Jayasekara, "SwiftLane: Towards Fast and Efficient Lane Detection," in Proceedings of International Conference on Machine Learning and Applications, , 2021, pp. 1--6.
URL: https://arxiv.org/abs/2110.11779
URL: https://arxiv.org/abs/2110.11779
Oshada Jayasinghe, Sahan Hemachandra , Damith Anhettigama, Shenali Kariyawasam , Ranga Rodrigo, and Peshala Jayasekara, "CeyMo: See More on Roads - A Novel Benchmark Dataset for Road Marking
Detection," in Proceedings of IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Wikoloa, HI, January 2022, pp. 3104--3113.
URL: https://openaccess.thecvf.com/content/WACV2022/html/Jayasinghe_CeyMo_See_More_on_Roads_-_A_Novel_Benchmark_Dataset_WACV_2022_paper.html
URL: https://openaccess.thecvf.com/content/WACV2022/html/Jayasinghe_CeyMo_See_More_on_Roads_-_A_Novel_Benchmark_Dataset_WACV_2022_paper.html
Explore my computer vision, deep learning, and language model research projects and a full list of recent academic publications.